swordfish ardupilot v-tail
Log of Atomrc swordfish build, issues, and troubleshooting
Hardware

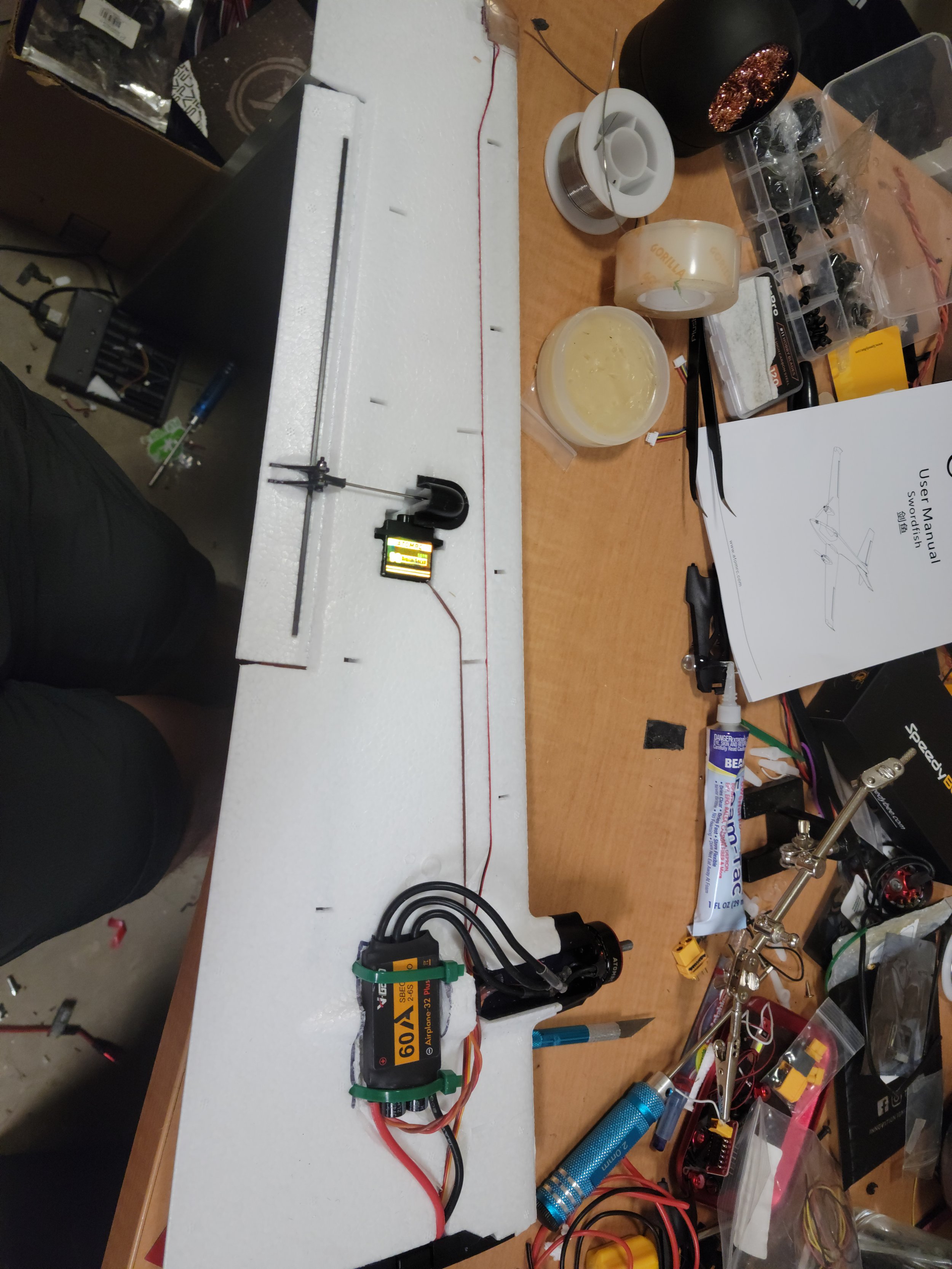
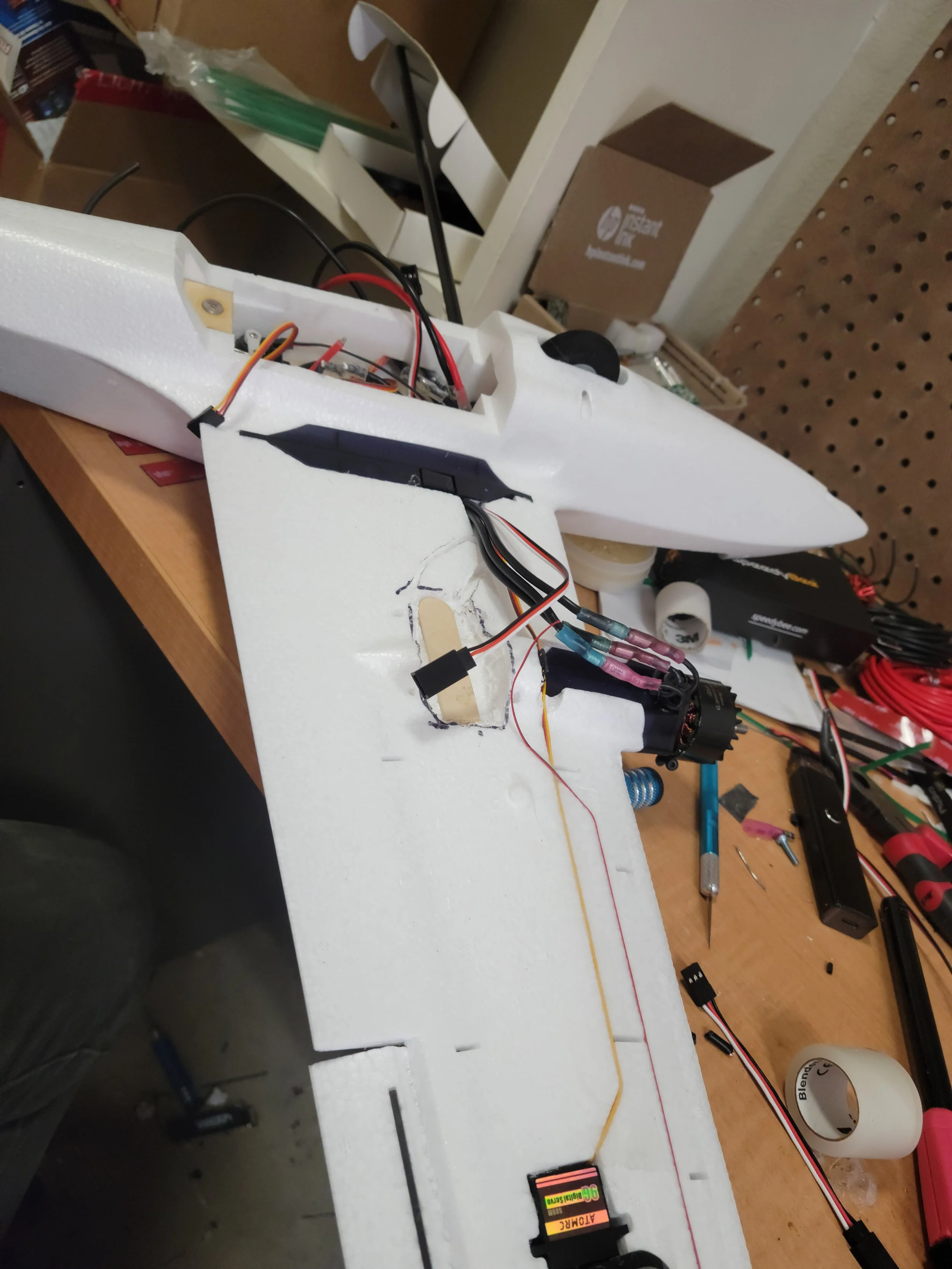
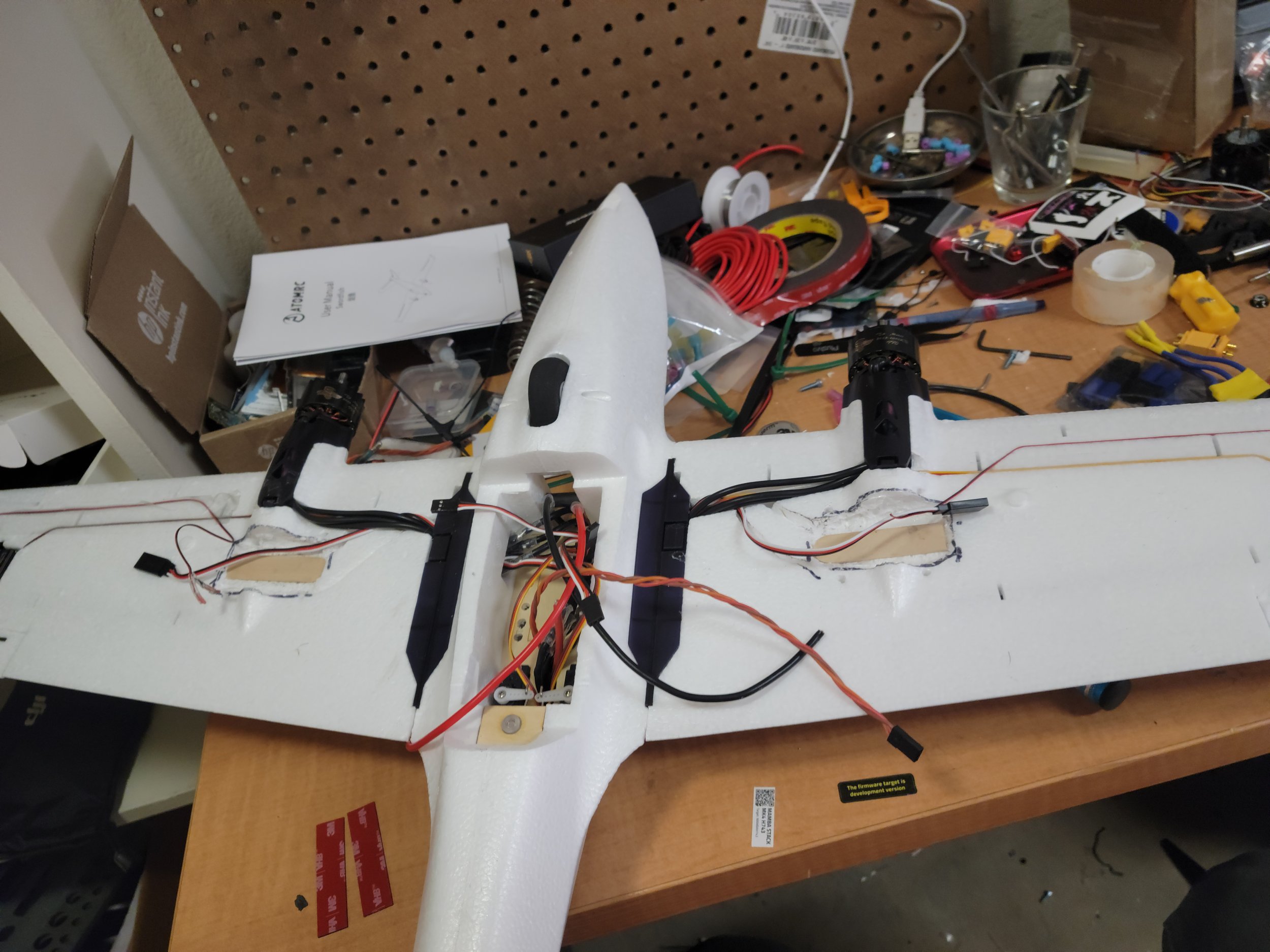
Frame: AtomRC Swordfish
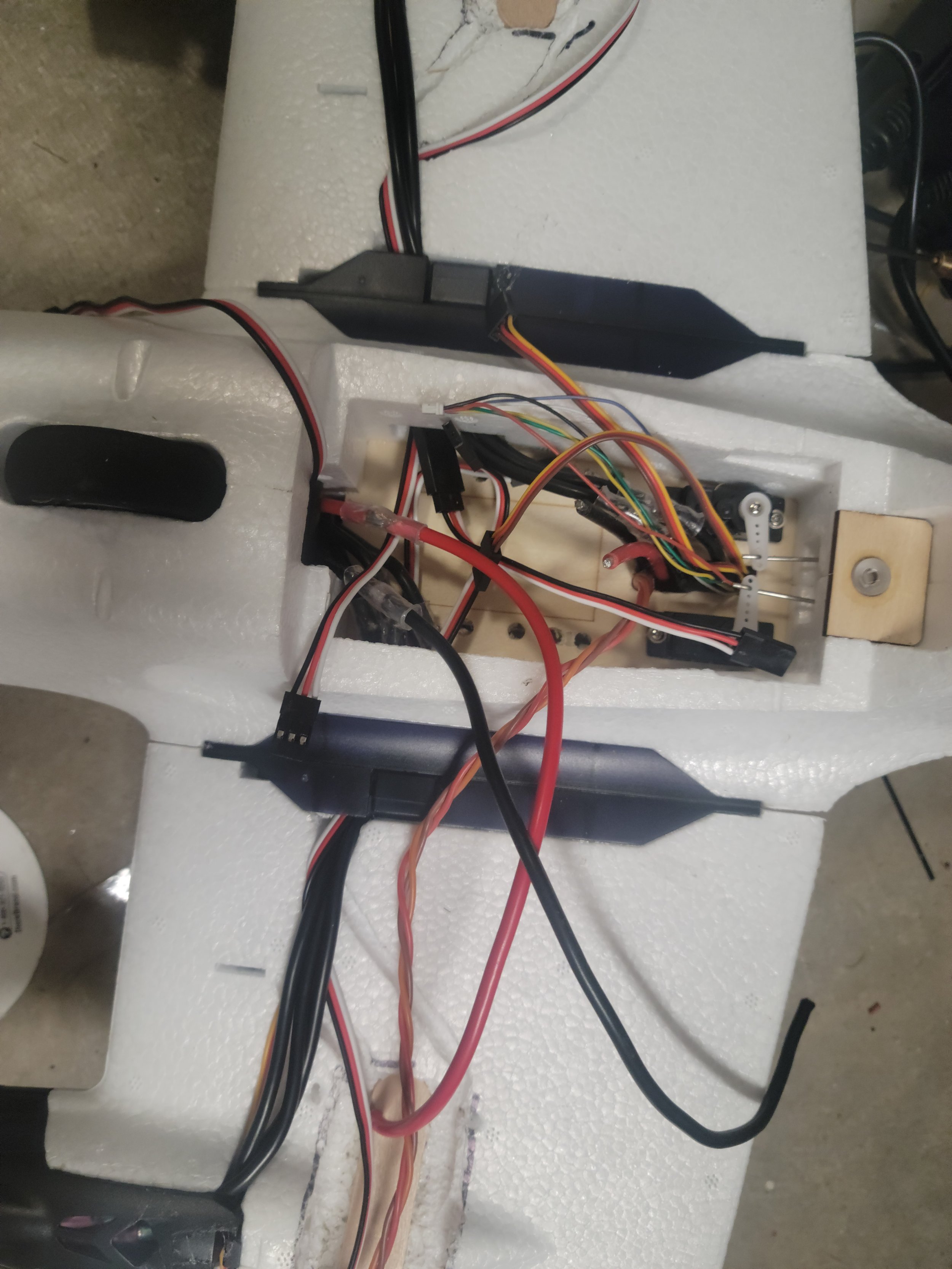
Flight Controller: Speedybee F405 running Ardupilot
Motors: 2x Brotherhobbby 2816 1050kv
ESC’s: 2x no name 60A ESC’s I had in my garage
Receiver: Crossfire Diversity
Sensors: Matek Opticalflow/LIDAR, Matek analog Pitot tube, GPS , camera on pan mount slaved to the yaw stick
Challenges
This specific frame is extremely small for all of the components I wanted to fit in it. I had to extensively modify the frame to accomodate everything. A few custom 3D printed parts were needed to mount pieces that the airframe isnt necessarily made for. The LED strips were added essentially because I felt they looked cool, however to get the look I wanted required homemade jigs for the foam cutter and airframe modifications to hide the wiring. This is also my first real ardupilot build, and I learned a lot about how to make the entire system and sensors work together to successfully fly.